

Back in May 2018, the North Sea was the theater of a new kind of more efficient and flexible rig move operation. Transferred to a new location within meters of a live production manifold, this delicate relocation mission was performed by iXblue, a global leader in the design and manufacturing of innovative navigation and positioning solutions, and an Aberdeen-based positioning and survey provider.
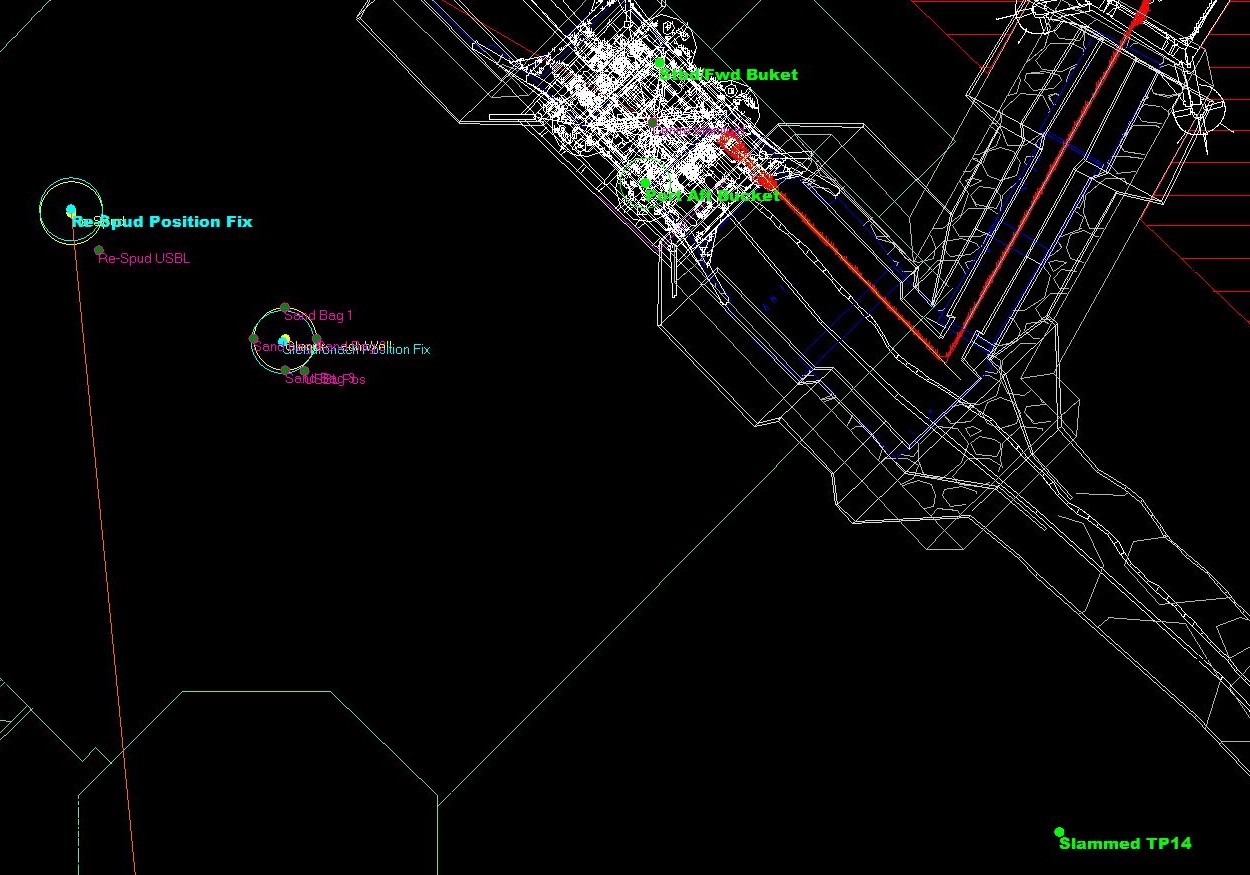 Navigation software screenshot showing the marked positions
Navigation software screenshot showing the marked positions
In a global climate of reducing costs on the challenging Offshore market, iXblue’s navigation and positioning technology was chosen for this operation as it provided a smarter and more flexible way to achieve the required positioning accuracy without having to pre-install an LBL (Long Baseline) array of beacons on the seabed, a costly and lengthy operation that would have involved the mobilization of a separate ROV support vessel for the layout and calibration of the array. The new solution offered by iXblue, more efficient and less time-consuming, only required the installation of 3 transponders on the seabed during the time of the operation and proved to be very successful, lasting only 6 hours.
For this operation, the existing structure already installed on the seabed, that included two manifold-mounded transponder buckets which positions were known, was used for the quick deployment of a sparse array of Canopus beacons, iXblue new acoustic transponder. The ROV used for this rig move was thus able to navigate with the utmost accuracy and position the Canopus transponders in each available bucket thanks to the use of iXblue’s Phins INS (Inertial Navigation System) and Ramses LBL and sparse LBL transceiver, both fitted onto the ROV.
 Xblue Canopus transponder mounted on the manifold during the operation
Xblue Canopus transponder mounted on the manifold during the operation
Because the precise location of the two transponders were already known, there was no need to calibrate them from the surface, saving precious operational time, and the ROV was able to ensure that the required gap between the new drilling template and the live infrastructure was maintained. It was however soon evident that the acoustic visibility of the manifold-mounted transponders was limited and a third un-calibrated Canopus beacon was deployed in a tripod on the seabed. Quick calibration of this additional transponder was however conducted thanks to the tight integration of the Ramses transceiver to the Phins INS.
The process of calibrating a beacon relative to existing known locations is known as SLAM(ing) (Simultaneous Localisation And Mapping). The ranges to the two known beacon locations were passed to the Phins INS as an aiding input, along with velocity information provided thanks to intelligent DVL coupling, depth data provided by the pressure sensor, and sound velocity data from the SV sensor.
 Xblue Canopus transponder installed on a tripod
Xblue Canopus transponder installed on a tripod
A quick circular trajectory was then taken by the ROV around the Canopus transponder requiring calibration. During the manoeuvres, the Ramses transceiver fitted on the ROV kept correlating the change in range measurements to the beacon under calibration, integrating the trajectory from the INS. Continuously adjusting the estimated position of the beacon being calibrated to fit the change in range, the correct location of the Canopus transponder was then known. The whole process of “SLAMing” a beacon on the seabed using the ROV is a fast operation, completed in a matter of minutes. During this operation, the Canopus transponder was positioned relative to the live manifold with a latitude standard deviation of 3.7cm and a longitude standard deviation of 4.8cm after two clockwise and two counter clockwise circuits over the beacon.
With the three calibrated Canopus transponders now deployed and their exact location known, the ROV was able to be precisely positioned within the area of the new drill location, ensuring reliable navigation. The ROV was thus able to move to the primary drill location to deploy a marker buoy on location and four buoys at the extents of the template to facilitate the future deployment.
Thanks to the innovative navigation and acoustic positioning technology developed by iXblue, this rig move operation was thus efficiently conducted in a record time of 6 hours only, including deploying the ROV to the seabed, placing and calibrating the Canopus transponders, and placing the marker buoys (with a position accuracy estimated by the INS of better than 30cm and a relative precision better than 5cm). A new safe and reliable method for more efficient Offshore operations.
